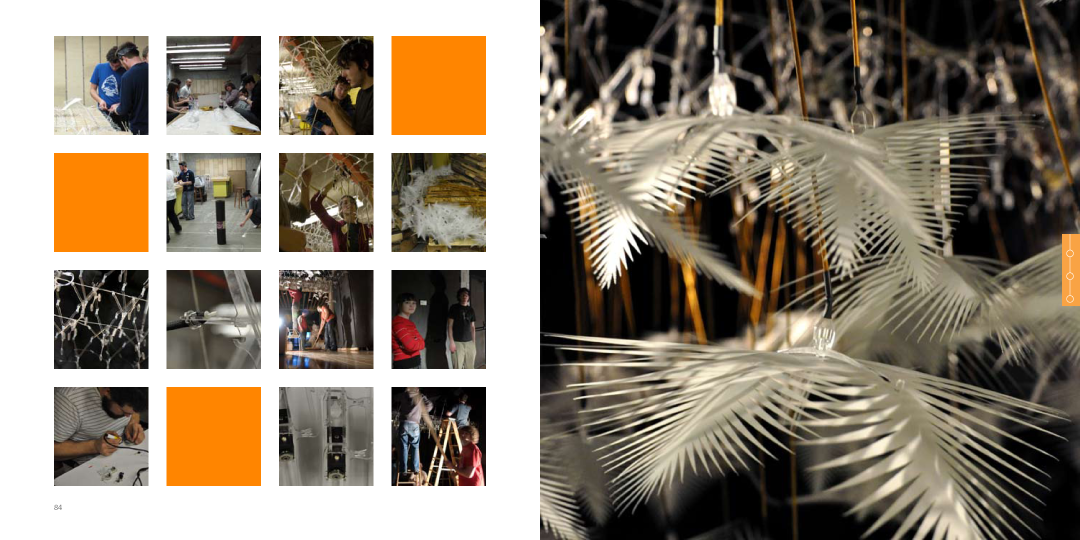
At the end of my semester in An Inconvenient Studio (Spring 2009), we held an Exhibition of our work in Indianapolis. The opening was open to the public and orders could be placed for hard copies of The Publication we planned to complete the following summer.

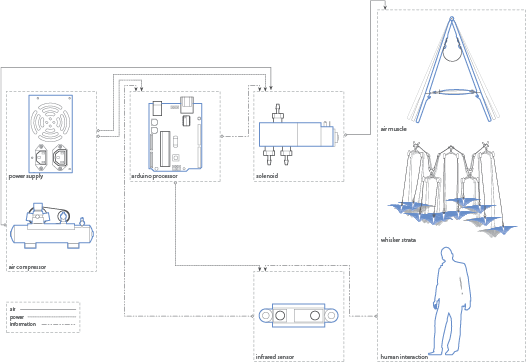
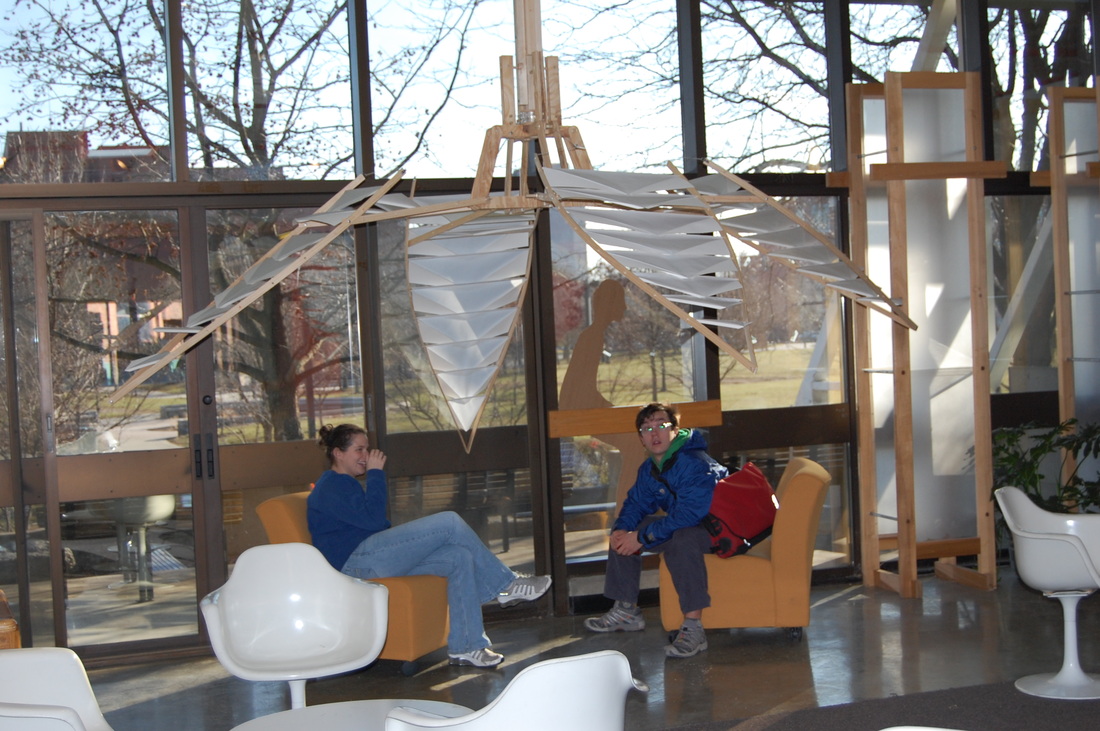
| The Exhibition also marked the unveiling of new projects from several members of An Inconvenient Studio. Morpho Luminescence by Adam, Elizabeth, and Kyle was pictured but not quite into the prototype stage. Reflex by Eric Brockmeyer (prototype on the right) used Arduino Processing and muscle wire to translate stimuli from the observer into motion. The Exhibition was open for 3 weeks at the CAP Indy Center. On a personal note, I just made the move back to Indianapolis (from Boston after 5 great years!). I'm excited to be back, and I look forward to making my mark on the landscape here. | 
|
This is my last post for now about the work that I did with An Inconvenient Studio back in 2009 since I finally have a sufficient amount of material on the Projects Page to peruse. Coming up will be some more recent personal work.






 RSS Feed
RSS Feed
